This is the multi-page printable view of this section.
Click here to print.
Return to the regular view of this page.
Developing and Maintaining Utils
The Leda teams provides some custom utilities that allow for a more integrated end-user experience. They can be found in the main leda-utils repository on GitHub: eclipse-leda/leda-utils.
The following pages are meant to serve as both internal documentation and general guidelines when developing for Leda.
Bash
Leda uses the classic Bourne shell as its main shell, thus all scripts should be sh-compatible (use the #!/bin/sh shebang). As a Poky+OE-based distro we use BusyBox for core-utils. To check explicitly for “bashisms” in your scripts, the
checkbashisms tool might be useful.
Utility-Specific Pages
The bash-based leda-utils are all deployed with the same recipe under the sdv-base packagegroup: meta-leda/meta-leda-components/recipes-sdv/sdv-base.
Rust
The current main branch for leda-distro (and meta-leda) is based on the Kirkstone Yocto/Poky release.
The version of the Rust toolchain available in OE (Kirkstone) is 1.59.0. Make sure to target 1.59.0 (or earlier) when developing Rust-based utils for leda. To set 1.59.0 as your default Rust version on your development machine:
$ rustup install 1.59.0
$ rustup default 1.59.0
$ cargo --version
cargo 1.59.0 (49d8809dc 2022-02-10)
Generating bitbake recipes with cargo-bitbake
After making sure your toolchain is on version 1.59.0 go trough a clean build of your Rust binary:
$ cd <rust_project_dir>
$ cargo clean
$ rm Cargo.lock
$ cargo build --release
This will make sure the Cargo.lock is re-generated with packages matching the Rust version. The cargo.bbclass on which Rust recipes are based, requires all Rust crates + their version (matching the Cargo.toml) to be specified as a “SRC_URI +=”. This can become tedious and error-prone if done by hand. That’s why meta-rust provides a tool called cargo-bitbake that generates a minimal recipe with all the crates it finds in the Cargo.lock files of the project.
$ cargo install --locked cargo-bitbake
$ cd <rust_project_dir>
$ cargo bitbake
This will generate a recipe in the project root which you can use as a starting point.
Example: kantui_git.bb
Note this recipe will only build your Rust crate. To deploy/install your binary you have to define a .inc file with the same name as the recipe that would handle the installation.
Example: kantui.inc
Known bugs
The built-in proc_macros crate is not being imported properly by meta-rust (Kirkstone), thus breaking all library crates that define a proc_macro (meta-rust issue 266). To fix this create a libstd-rs_%.bbappend file containing the single line:
S = "${RUSTSRC}/library/test"
meta-leda already provides this fix here, so it should not be necessary to implement it again.
“Fat” Link time optimization
LTO is a nice feature of LLVM that can optimize even through language boundaries at link-time, but leads to longer overall build times. That is why Rust by default uses “thin” LTO which may result in larger/slower binaries. “Fat” LTO can be enabled when building release binaries by adding to the Cargo.toml file the following section:
[profile.release]
lto = true
For kantui this leads to reduction of the final binary size from ~8 MiB to ~5 MiB.
More information on profile-optimizations can be found here.
Note: Stripping the debug symbols completely results in further binary size reduction, but BitBake fails with a QA problem when deploying stripped binaries.
Rust-based utilities
Utility-Specific Pages
1.1 - Communicating with Кanto-CM via gRPC
Kanto container management binds to a unix socket (default: /run/container-management/container-management.sock) and exposes a gRPC interface which can be used to obtain all the functionality of the kanto-cm cli programatically.
The easiest way to access this API through Rust is by creating a new Rust crate:
$ cargo new talk-to-kanto
Dependencies
The most feature-rich gRPC library for Rust right now is tonic. Add the following to your Cargo.toml to make tonic and the tokio async runtime available to your crate. Tower and hyper are needed to be able to bind to the unix socket.
[dependencies]
prost = "0.11"
tokio = { version = "1.0", features = [ "rt-multi-thread", "time", "fs", "macros", "net",] }
tokio-stream = { version = "0.1", features = ["net"] }
tonic = {version = "0.8.2" }
tower = { version = "0.4" }
http = "0.2"
hyper = { version = "0.14", features = ["full"] }
serde = { version = "1.0.147", features = ["derive"] }
serde_json = { version = "1.0.89", default-features = false, features = ["alloc"] }
[build-dependencies]
tonic-build = "0.8.2"
Compiling protobufs
The easiest way to obtain the kanto-cm .proto files is to add the container management repo in your project root as a git submodule:
$ git submodule init
$ git submodule add https://github.com/eclipse-kanto/container-management.git
$ git submodule update --init --recursive
You should now have the container-management repository available.
To build the .proto files during compile time, define a custom build.rs in the project root
Add the following main function to the build.rs:
fn main() -> Result<(), Box<dyn std::error::Error>> {
tonic_build::configure()
.build_server(false)
.include_file("mod.rs")
.type_attribute(".", "#[derive(serde::Serialize, serde::Deserialize)]")
.compile(
&["api/services/containers/containers.proto"],
&["container-management/containerm/"],
)?;
Ok(())
}
Here it is important to know that tonic does not like deeply nested protobufs such as those for kanto-cm. That is why the line .include_file("mod.rs") re-exports everything in a seperate module which can later be included in the main.rs file.
"#[derive(serde::Serialize, serde::Deserialize)]" makes all structures (de-)serializable via serde.
Importing generated Rust modules
Now in src/main.rs add the following to import the generated Rust modules:
pub mod cm {
tonic::include_proto!("mod");
}
use cm::github::com::eclipse_kanto::container_management::containerm::api::services::containers as cm_services;
use cm::github::com::eclipse_kanto::container_management::containerm::api::types::containers as cm_types;
Now all kanto-cm services as namespaced under cm_services.
Obtaining a unix socket channel
To obtain a unix socket channel:
use tokio::net::UnixStream;
use tonic::transport::{Endpoint, Uri};
use tower::service_fn;
let socket_path = "/run/container-management/container-management.sock";
let channel = Endpoint::try_from("http://[::]:50051")?
.connect_with_connector(service_fn(move |_: Uri| UnixStream::connect(socket_path)))
.await?;
This is a bit of a hack, because currently, tonic+tower don’t support binding directly to an unix socket. Thus in this case we attemp to make an http connection to a non-existent service on port 5051. When this fails, the fallback method connect_with_connector() is called where a tokio UnixStream is returned and the communication channel is generated from that.
Making a simple gRPC call to kanto-cm
All that is left is to use the opened channel to issue a simple “list containers” request to kanto.
// Generate a CM client, that handles containers-related requests (see protobufs)
let mut client = cm_services::containers_client::ContainersClient::new(channel);
let request = tonic::Request::new(cm_services::ListContainersRequest {});
let response = client.list(request).await?;
Since we made all tonic-generated structures (de-)serializable we can use serde_json::to_string() to print the response as a json string.
println!("{}", serde_json::to_string(&response)?);
1.2 - Kanto Auto deployer (KAD)
TLDR: To deploy a container in the final Leda image, all you generally need to do is add the manifest in the kanto-containers directory and re-build.
Kanto-CM does not provide (currently) a stable feature that allows for the automatic deployment of containers through manifest files similar to k3s’ automated deployment of k8s-manifests found in the /var/lib/rancher/k3s/server/manifests directory.
This can be worked around via a bash script for each container that runs on boot and makes sure it’s deployed. Even though this approach is functional it is not very structured and would require a lot repeating code.
That is why the “Kanto Auto deployer” tool was developed. It directly implements the ideas in Communicating with Кanto-CM via gRPC.
The compiled binary takes a path to a directory containing the json manifests, parses them into Rust structures and sends gRPC requests to kanto container management to deploy these containers.
Manifest structure
Because Kanto CM uses different JSON formats for the interal state representation of the container (from the gRPC API) and for the deployment via the Container Management-native init_dir-mechanism, KAD supports both through the “manifests_parser” module.
The conversion between formats is automatic (logged as a warning when it’s attempted)
so you do not need to provide extra options when using one or the other.
This is the CM-native format, described in the Kanto-CM documentation.
It is the recommended format since KAD is supposed to be replaced by native CM deployment modules in the future and this manifest
format will be compatible with that.
It also allows you to ommit options (defaults will be used). KAD will issue a log warning when the “manifests_parser” attempts to convert this manifest format
to the gRPC message format (internal state representation).
Internal State Representation
The KAD “native” manifests format uses the exact same structure for its manifests as the internal representation of container state in kanto container management.
This manifest format does not allow keys in the json to be ommited, so these manifests are generally larger/noisier.
For example:
{
"id": "",
"name": "databroker",
"image": {
"name": "ghcr.io/eclipse/kuksa.val/databroker:0.2.5",
"decrypt_config": null
},
"host_name": "",
"domain_name": "",
"resolv_conf_path": "",
"hosts_path": "",
"hostname_path": "",
"mounts": [],
"hooks": [],
"host_config": {
"devices": [],
"network_mode": "bridge",
"privileged": false,
"restart_policy": {
"maximum_retry_count": 0,
"retry_timeout": 0,
"type": "unless-stopped"
},
"runtime": "io.containerd.runc.v2",
"extra_hosts": [],
"port_mappings": [
{
"protocol": "tcp",
"container_port": 55555,
"host_ip": "localhost",
"host_port": 30555,
"host_port_end": 30555
}
],
"log_config": {
"driver_config": {
"type": "json-file",
"max_files": 2,
"max_size": "1M",
"root_dir": ""
},
"mode_config": {
"mode": "blocking",
"max_buffer_size": ""
}
},
"resources": null
},
"io_config": {
"attach_stderr": false,
"attach_stdin": false,
"attach_stdout": false,
"open_stdin": false,
"stdin_once": false,
"tty": false
},
"config": {
"env": [
"RUST_LOG=info",
"vehicle_data_broker=debug"
],
"cmd": []
},
"network_settings": null,
"state": {
"pid": -1,
"started_at": "",
"error": "",
"exit_code": 0,
"finished_at": "",
"exited": false,
"dead": false,
"restarting": false,
"paused": false,
"running": false,
"status": "",
"oom_killed": false
},
"created": "",
"manually_stopped": false,
"restart_count": 0
}
The only difference to the actual internal state representation is that fields in the manifest can be left empty ("") if they are not important for the deployment. These values will be filled in with defaults by kanto-cm after deployment.
For example, you do not need to specify the container “id” in the manifest, as an unique uuid would be assigned automatically after deployment.
Container deployment in Leda
Kanto-auto-deployer can run as a one-shot util that goes through the manifest folder (default: /data/var/containers/manifests) and deploys required containers.
When you pass the --daemon flag it would enable the “filewatcher” module that would continuously monitor the provided path for changes/creation of manifests.
The Bitbake recipe for building and installing the auto deployer service can be found at kanto-auto-deployer_git.bb.
This recipe also takes all manifests in the kanto-containers directory and installs them in the directory specified by the KANTO_MANIFESTS_DIR BitBake variable (weak default: /var/containers/manifests).
Important: To deploy a container in the final Leda image, all you generally need to do is add the manifest in the kanto-containers directory and re-build.
Conditional compilation of the filewatcher module
To reduce binary bloat the --daemon option is namespaced under the filewatcher conditional compilation flag (enabled by default).
To compile KAD without the filewatcher module run: cargo build --release --no-default-features.
(Implemented in Leda Utils PR#35)
1.3 - Kantui
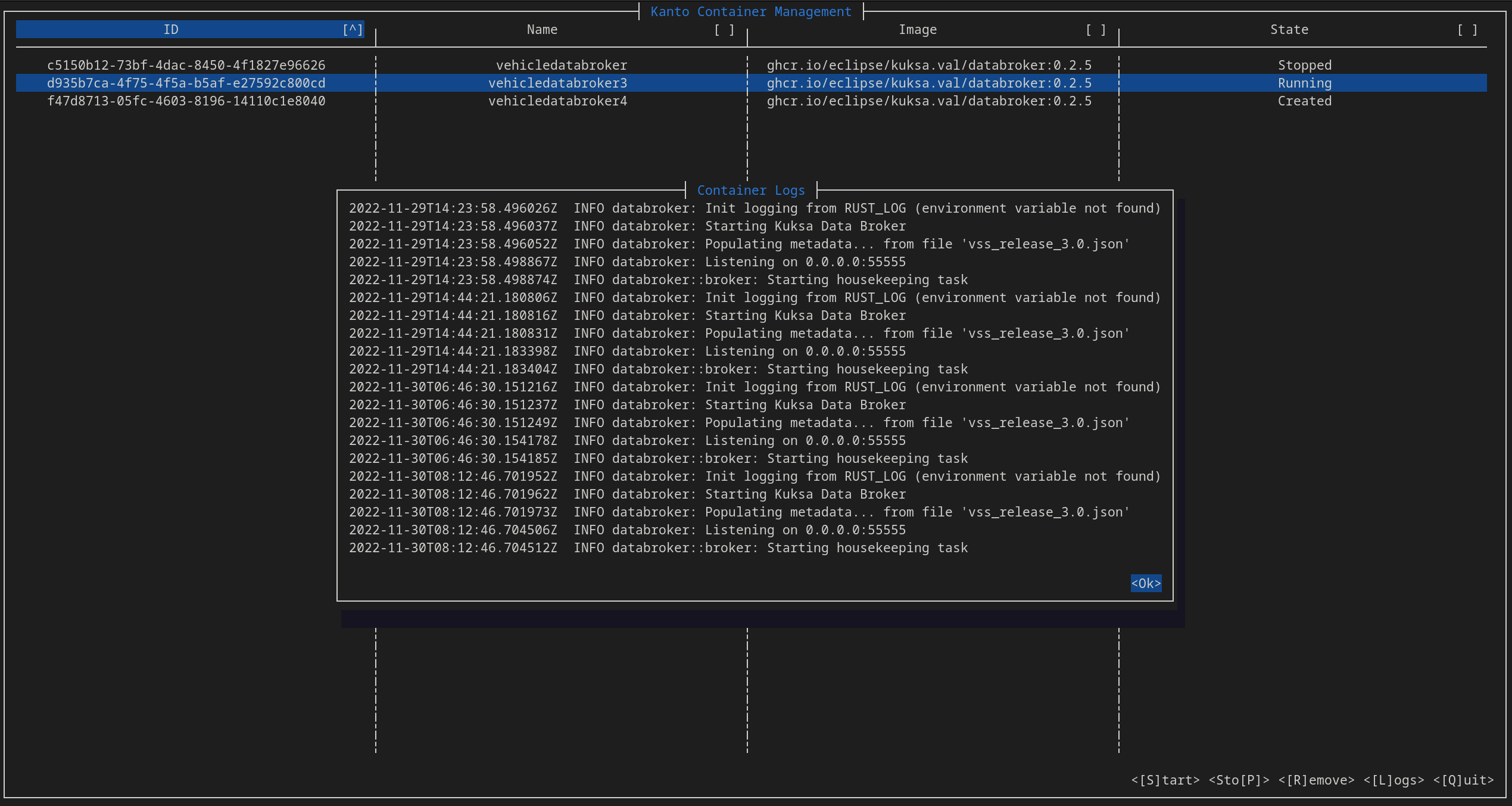
The k8s ecosystem comes with a lot of utilies that allow for the easier management of containers (such as k9s). The kantui util aims to be a “nice” text user interface that lets the user start/stop/remove/get logs of deployed containers in kanto-cm.
Development notes
This tool is again based on the ideas in Communicating with Кanto-CM via gRPC.
It spins up two threads - an UI thread (drawing/updating UI) and an IO thread (communicating with kanto-cm via gRPC). The communication between these two threads happens over an async-priority-channel with ListContainers request having a lower priority than Start/Stop/Remove/Get Logs (“user interaction”) requests.
This in an “eventually fair” mechanism of communication. That way even if kanto-cm is handling a slow request (such as stopping a container that does not respect SIGTERM) the UI thread is never blocked, allowing for a responsive-feeling UI. The size of the channel is 5 requests and the UI is running at 30 fps. Thus even if the UI gets out-of-sync with the actual state of container management it would be “only” for 5 out 30 frames.
Cursive and ncurses-rs
The cursive crate is used as a high level “framework” as it allows very easy handling of UI events via callbacks, though this might be prone to callback hell.
The default backend for cursive is ncurses-rs which a very thin Rust wrapper over the standart ncurses library. This in theory would be the optimal backend for our case as ncurses is a very old and stable library that has buffering (other backends lead to flickering of the UI on updates) and is dynamically linked (smaller final binary size).
The ncurses-rs wrapper however is not well-suited to cross-compilation as it has a custom build.rs that generates a small C program, compiles it for the target and tries to run it on the host. The only reason for this C program to exist is to check the width of the char type. Obviously, the char type on the host and the target might be of different width and this binary might not even run on the host machine if the host and target architectures are different.
After coming to the conclusion that the ncurses-rs backend was not suitable, kantui was migrated to the termion backend + the cursive_buffered_backend crate which mitigates the flickering issue.
[dependencies]
...
cursive_buffered_backend = "0.5.0"
[dependencies.cursive]
default-features=false
version = "0.16.2"
features = ["termion-backend"]
This completely drops the need for ncurses-rs but results in a slightly bigger binary (all statically linked).
Bitbake Recipe
The recipe was created following the guidelines in Generating bitbake recipes with cargo-bitbake and can be found in meta-leda/meta-leda-components/recipes-sdv/eclipse-leda/.
Future improvement notes
-
The gRPC channel can get blocked thus effectively “blocking” the IO-thread until it is freed-up again. Maybe open a new channel for each request (slow/resource heavy)?
-
Reorganize the code a bit, move all generic functionally in the lib.rs.
2.1 - sdv-health
A general utility for monitoring the status of important sdv services/containers/devices.
Checking the status of kanto-cm containers
Kanto CM containers are split into two groups - required and optional. Both groups are checked, but only a warning is issued when an optional container is missing/not working.
General code for checking the status is:
if [ -n "$KANTO_CM_CONTAINERS_OPT" ]; then
printf -- "$SEPARATOR\n"
printf -- "${COL_WHITE}[Kanto CM Containers (OPTIONAL)]${COL_NC}\n"
if [[ ${CM_STATUS} != *"inactive"* ]]; then
# "Optional containers"
KANTO_CM_LIST=$(${KANTO_CMD} list)
# removes tabs, splits on pipe and takes the container name column ($2)
FOUND_CONTAINERS=($(echo "$KANTO_CM_LIST" | awk -F'|' '{gsub(/\t/, ""); print $2}')) # array with all kanto container names
# removes tabs, splits on pipe and takes the container status colum ($4)
FOUND_CONTAINERS_STATES=($(echo "$KANTO_CM_LIST" | awk -F'|' '{gsub(/\t/, ""); print $4}')) # array with all kanto container states
KANTO_CM_CONTAINERS_ARR=( $KANTO_CM_CONTAINERS_OPT )
for expectedCtr in ${KANTO_CM_CONTAINERS_ARR[@]}; do
CTR_IDX=$(get_array_element_index ${expectedCtr} ${FOUND_CONTAINERS[@]})
if [ ! -z $CTR_IDX ]; then
status=${FOUND_CONTAINERS_STATES[$CTR_IDX]}
if [ "$status" = "Running" ]; then
printf " * %-40s : $TEXT_OK\n" "${expectedCtr}"
else
printf " * %-40s : $TEXT_WARN (%s)\n" "${expectedCtr}" "$status"
fi
else
printf " * %-40s : $TEXT_WARN (%s)\n" "${expectedCtr}" "NOT FOUND"
fi
done
else
printf " * %-40s : $TEXT_FAIL (%s)\n" "Kanto Container Management" "Unavailable"
fi
fi
Here it is important to know that kanto-cm list outputs the list of containers in a different order every time it’s called. That is why, kanto-cm list is invoked once and its output is stored in a variable:
KANTO_CM_LIST=$(${KANTO_CMD} list)
Output:
ID |Name |Image |Status |Finished At |Exit Code |
------------------------------------- |------------------------------------- |------------------------------------------------------------ |---------- |------------------------------ |---------- |
d82a406e-80d7-4d2c-8044-3799544fc39a |vum |ghcr.io/eclipse-leda/leda-contrib-vehicle-update-manager/vehicleupdatemanager:main-1d8dca55a755c4b3c7bc06eabfa06ad49e068a48 |Running | |0 |
0f079856-767c-4e8d-b4df-a2323392849f |cloudconnector |ghcr.io/eclipse-leda/leda-contrib-cloud-connector/cloudconnector:main-47c01227a620a3dbd85b66e177205c06c0f7a52e |Exited |2023-01-31T11:58:01.564126452Z |1 |
e4cf317e-c2d3-42c7-8f12-8ecf6f9d5d7a |databroker |ghcr.io/eclipse/kuksa.val/databroker:0.2.5 |Running | |0 |
6440a9b6-4fb8-4735-b3de-484286ac705b |feedercan |ghcr.io/eclipse/kuksa.val.feeders/dbc2val:v0.1.1 |Running | |0 |
efbd572b-3331-4f19-9b17-7c69511ec5ca |hvacservice-example |ghcr.io/eclipse/kuksa.val.services/hvac_service:v0.1.0 |Running | |0 |
6d9a6f07-1659-4b51-9ddb-6e9ade64f2fd |seatservice-example |ghcr.io/eclipse/kuksa.val.services/seat_service:v0.1.0 |Running | |0 |
06b0ddf2-7c91-41e4-9a00-4213ee361cdf |sua |ghcr.io/eclipse-leda/leda-contrib-self-update-agent/self-update-agent:build-12 |Running | |0 |
So we use awk to split on pipe (column), strip unecessary tabs. print $2 then gives us the container name and print $4 - its status.
sdv-health then proceeds to check if every container specified in the list is available and if its status is Running.
Note: Exited is considered a fail-state.
Checking kanto-cm socket
This is a simple test -s check for the default socket path.